We bridge the gap between technical engineering and societal impact, specializing in industrial automation, XR-integrated robotics, and inclusive AI pedagogy.
Research and Development Projects
Some of our research groups’ ongoing and past projects.
UEF Teaching Development Grant
The UEF teaching development grant was awarded in 2024 for the development of various robotics courses taught at UEF under the School of Computing (SoC) and the Department of Technical Physics (DoTP). This grant was also used to develop the RoboEdu platform, a server-based system that lets students run Ubuntu and ROS (Robot Operating System) remotely, allowing students to practice with advanced robotics software on any computer without needing expensive, high-powered hardware.
RoboSTEAMSEN
The RoboSTEAMSEN project (2023–2025) focused on the intersection of robotics and inclusive education. Its primary goal was to adapt robotics and active learning methodologies to the specific needs of students with Intellectual and Developmental Disabilities (IDD). By personalizing learning experiences, the project ensured that STEAM education is accessible to all learners. More information can be found here.
RoboSTEAM
The RoboSTEAM project was a foundational initiative for our group, focusing on integrating Science, Technology, Engineering, Arts, and Mathematics (STEAM) with Computational Thinking (CT). By utilizing robotics and physical devices, the project developed challenge-based learning frameworks designed to bridge the gap between theoretical concepts and practical application in K-12 environments. More information can be found here.
Academic Courses & Training
Covers the fundamental mechanics, sensing, and programming of robotic systems with the use of Arduinos and Lego Mindstorms.
The course covers the most common types of robots and their application in different fields, along with the installation, configuration, and basic use of the ROS2 application framework.
A project-based course where students apply their robotics skills to solve real-world challenges. The project can be done with both simulated and physical hardware.
Muntuumo, J., et al. (2026). ROS-Based Robotics Education in K–12: A Systematic Review of Teaching Approaches and Learning Outcomes. In 6th International Conference on Computing and Communication Networks (ICCCNet-2026). Accepted for publication.
Mashood, H., et al. (2026). From Novice to Practitioner in Two Weeks: A Qualitative Study of Intensive Industrial Robotics Education. In Proceedings of 17th International Conference on Robotics in Education (RiE 2026). Accepted for publication.
Pramanic, M. S., et al. (2026). RoboEdu: A Remote Robotics Education Environment for Learning ROS 2. In Proceedings of 17th International Conference on Robotics in Education (RiE 2026). Accepted for publication.
Conde-González, M., et al. (2026). A Systematic Literature Review on the Benefits of Robotics and Active Learning Methodologies for Promoting STEAM Education among Students with Intellectual and Developmental Disabilities. International Journal of Engineering Education.
Jormanainen, I., et al. (2025). Lessons Learnt from the Development of Remotely Accessible ROS 2 Learning Environment. RiE 2025, Springer.
Jormanainen, I., et al. (2025). Simulation vs. Reality: Does It Matter? Investigating Student Motivation in Robotics Course Projects in Hybrid Learning Setting. RiE 2025, Springer.
Jormanainen, I., et al. (2024). Intensive Robotics Course Projects Improve Higher Education Students’ Intrinsic Motivation and Learning Outcomes. RiE 2024, Springer.
Conde, M.Á., et al. (2024). ROBOSTEAMSEN Project – Training SEN Teachers to Use Robotics for Fostering STEAM and Develop Computational Thinking. SIIE 2024, IEEE.
Shipepe, A., et al. (2023). Integrating secondary school and primary school learners to grasp robotics in Namibia through collaborative learning. RiE 2023, Springer.
Shipepe, A., et al. (2022). Co-Learning Computational and Design Thinking Using Educational Robotics: A Case of Primary School Learners in Namibia. Sensors.
Pedersen, B.K.M.K., et al. (2022). Taxonomy for Educational Robotics at Schools. RiE 2022, Springer.
Conde, M. Á., et al. (2021). RoboSTEAM Project: Integrating STEAM and Computational Thinking Development by Using Robotics and Physical Devices. IGI Global.
Mrong, S., et al. (2021). Visualization tool for teaching and learning Artificial Neural Networks. TEEM 2021, ACM.
Conde, M., et al. (2021). RoboSTEAM project the pilot phases. TEEM 2021, ACM.
Conde, M. Á, et al. (2020). Adaptation of RoboSTEAM Project to the Pandemic Situation. TEEM 2020, ACM.
Shipepe, A, et al. (2020). Educational Robotics Initiatives in Namibia and Worldwide. TEEM 2020, ACM.
Jormanainen, I., & Tukiainen, M. (2020). Attractive Educational Robotics Motivates Younger Students to Learn Programming and Computational Thinking. TEEM 2020, ACM.
Conde, M. Á, et al. (2020). Exchanging Challenge Based Learning Experiences in the Context of RoboSTEAM Erasmus+ Project. HCII 2020, Springer.
Shipepe, A., et al. (2020). Screams of joy yield creative projects at the educational robotics workshop in Namibia. ICALT 2020, IEEE.
Toivonen, T., et al. (2019). Augmented Intelligence in Educational Data Mining. Smart Learning Environments.
Conde, M. Á, et al. (2019). RoboSTEAM – Definition of a Challenge Based Learning Approach for integrating STEAM and develop Computational Thinking. TEEM 2019, ACM.
Jormanainen, I. (2018). On computer science major students’ motivation in a practically oriented robotics course. Koli Calling 2018, ACM.
Toivonen, T., et al. (2017). An open robotics environment motivates students to learn the key concepts of artificial neural networks and reinforcement learning. RiE 2017, Springer.
Laamanen, M., et al. (2015). Theater Robotics for Human Technology Education. Koli Calling 2015, ACM.
Jormanainen, I., & Sutinen, E. (2014). Role blending in a learning environment supports facilitation in a robotics class. Journal of Educational Technology & Society.
Jormanainen, I., et al. (2012). A novel learning environment to support teacher’s work in a robotics class. AROB 2012.
Jormanainen, I., & Sutinen, E. (2012). Using Data Mining to Support Teacher’s Intervention in a Robotics Class. DIGITEL 2012, IEEE.
Jormanainen, I., et al. (2009). Understanding open learning processes in a robotics class. Koli Calling 2009.
Jormanainen, I., & Harfield, A. (2008). Supporting the teacher in educational robotics classes: work in progress. ICCE 2008.
Zhang, Y., et al. (2008). An Implementation of Agency Architecture in Educational Robotics. ICALT 2008, IEEE.
Jormanainen, I., et al. (2007). Pedagogical Agents for Teacher Intervention in Educational Robotics Classes: Implementation Issues. DIGITEL 2007, IEEE.
Jormanainen, I., et al. (2006). Implementation of Intelligent Agents with Mobility in Educational Robotics Settings. WMUTE 2006, IEEE.
Jormanainen, I., et al. (2006). Agency Architecture for Teacher Intervention in Robotics Classes. ICALT 2006, IEEE.
Collaborations
Our research is driven by a growing interest from industry and academic partners to secure expertise in advanced robotics.
Our doctoral researchers focus on high-impact areas.
Annastasia Shipepe, 2023: A Design Study on Educational Robotics in Namibia, Supervisors: Dr. Ilkka Jormanainen, Prof. Markku Tukiainen, UEF; Prof. Erkki Sutinen, University of Turku, UEF eREPO
Tapani Toivonen, 2020: Open Machine Intelligence in Education, Supervisors: Dr. Ilkka Jormanainen, Prof. Markku Tukiainen, UEF, UEF eREPO
Ilkka Jormanainen, 2014: Supporting Teachers in Unpredictable Robotics Learning Environments, Supervisors: Prof. Erkki Sutinen, UEF; Dr. Meurig Beynon, Emeritus Reader, University of Warwick; Prof. Kinshuk, Athabasca University, UEF eREPO
Master’s students focus on specialized applications in various fields within robotics.
Haris Mashood, 12/2025: Evaluating Student Learning Outcomes in an Industrial Robotics Summer School – A Case Study, UEF eREPO
Fabiano Junior Maia Manchein, 9/2024: Evaluating State-of-the-Art LiDAR SLAM in Challenging Indoor Environments with Glass and Specular Surfaces, UEF eREPO
Teemu Voutilainen, 7/2024: Vahvistusoppimismallin siirtäminen Webots-simulaatiosta robotille (Reinforcement learning model from Webots to a robot), UEF eREPO
Edward Brown, 9/2023: Comparison of sumo robot agents trained in real, sim-to-real and hybrid environments, UEF
Patrik Sunnaborg, 5/2023: TinyML osana älykästä esineiden internetiä (TinyML as a part of the smart Internet of Things), UEF eREPO
Natnael Yacob Asgedom, 10/2021: Robotic and block-based programming with Text Interpreter for motivating novice programmers, UEF eREPO
Salseng Mrong, 3/2021: Visualization of the Artificial Neural Network for Machine Learning novices, UEF eREPO
Tapani Toivonen, 6/2016: Extending Empirical Modelling with a physical computing framework, UEF eREPO
Mikko Laamanen, 3/2015: Architecture of theatre robotics, UEF eREPO
Undergraduate projects often focus on hands-on applications and introductory robotics challenges.
Glory Olusola: Model Context Protocol for Tool Using LLM Agents in Robotics Systems
Lannie Uwu-khaeb: Use of Interbotix PincherX 100 robot arm
Maxim Kasatkin: Tekoälyn hyödyntäminen robotin navigoinnissa ja autonomiassa (Utilizing artificial intelligence in robot navigation and autonomy)
Linnea Tiihonen: Tekoäly ja robotiikka itseohjautuvissa ajoneuvoissa (Artificial intelligence and robotics in self-driving vehicles)
Elmeri Saurus: Droonien käyttö tulevaisuuden taistelukentällä tekoälyn ja ELSO:n kehitysnäkökulmista (The Use of Drones on the Future Battlefield from the Development Perspectives of AI and Electronic Warfare)
Software, Learning Materials & Infrastructure
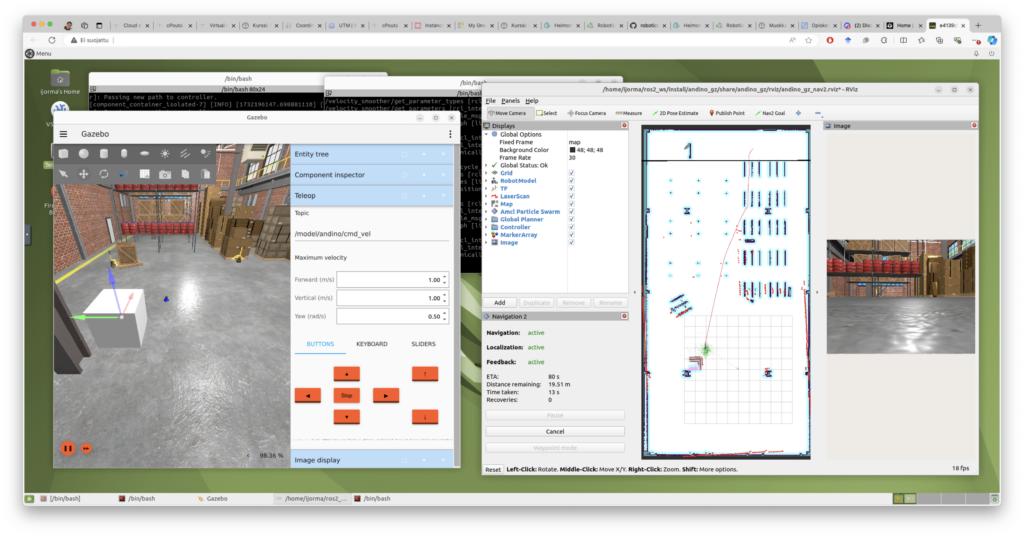
RoboEdu is a server-based system that allows students to run Ubuntu and ROS (Robot Operating System) remotely. This setup enables practice with advanced robotics software on any computer without needing expensive, high-powered hardware.
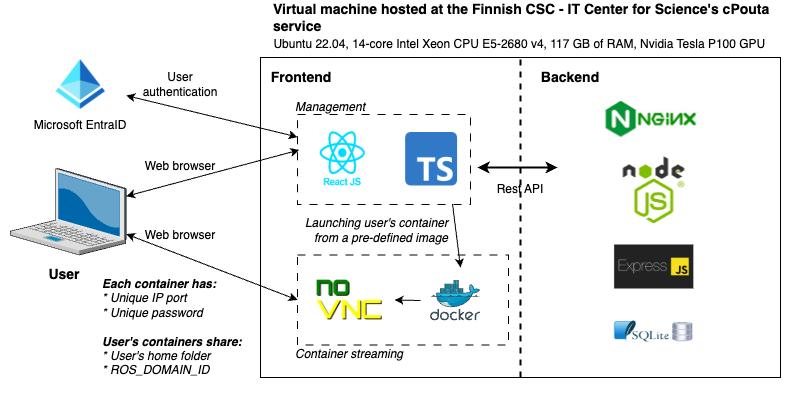
The platform is hosted on a high-performance virtual machine at the Finnish CSC – IT Center for Science. It utilizes Docker containers to provide each user with a unique IP port and streaming interface. The environment supports intensive simulation tasks using hardware such as Nvidia Tesla P100 GPUs.
Figure 1: The RoboEdu interface featuring Gazebo simulation and Rviz visualization.
Figure 2: System architecture and hosting infrastructure at CSC.
Technical Reference
Jormanainen, I., Pramanic, M. S., Kortelainen, M., & Vartiainen, P. (2025). Lessons Learnt from the Development of Remotely Accessible ROS 2 Learning Environment. Robotics in Education (RiE 2025). Springer.
Learning materials developed in collaboration with Henki Robotics, focusing on the fundamentals of the ROS 2 framework.
Practical examples and software configurations for the UR3 collaborative robot, originally developed by Mohammadhossein Salari for our intensive summer school sessions.
Our lab is equipped with a wide range of industrial and research-grade robotics hardware, supporting both the School of Computing and Department of Technical Physics initiatives.
Collaborative Manipulators
UR3e: A highly flexible, collaborative robot arm for precise automation.
PincherX 100: An educational research manipulator for vision-based control.
Mobile Robotics Platforms
TurtleBot 4: The latest generation of open-source research platforms for ROS 2.