Cobot for stroke rehabilitation and TMS navigation
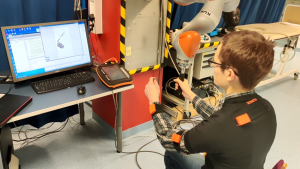
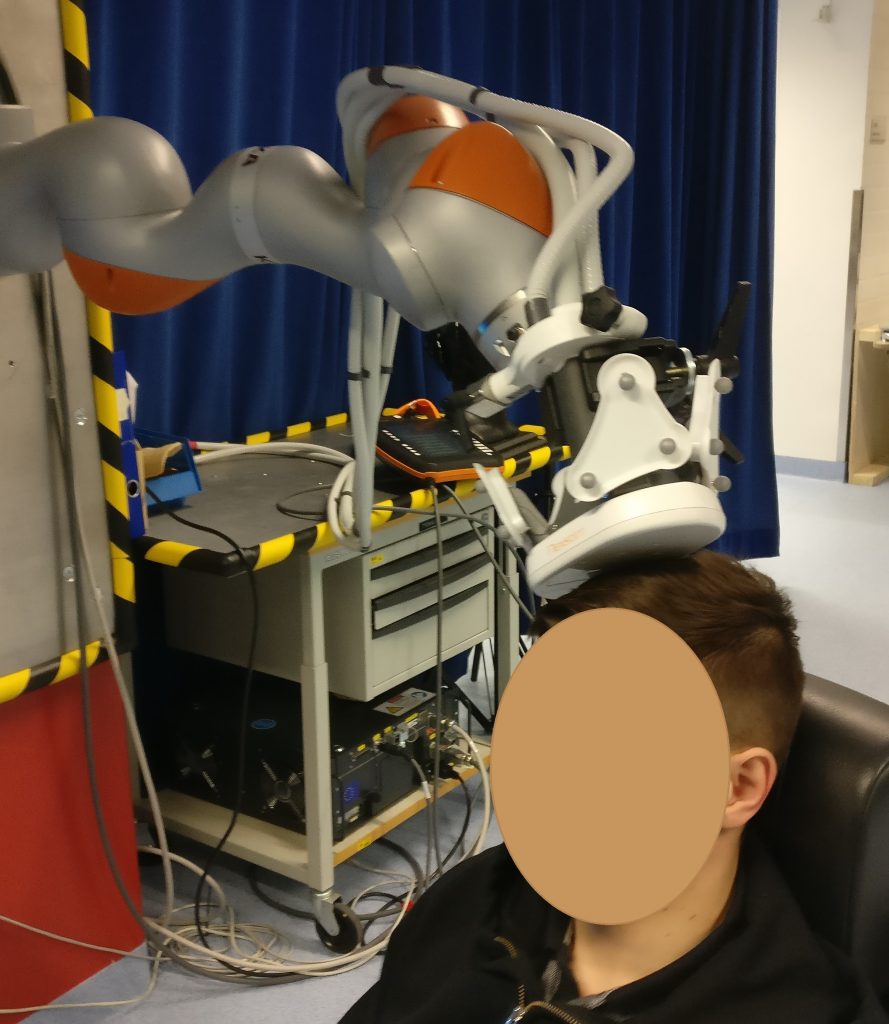
Stroke is a common incident causing loss of limb function. Rehabilitation of upper limb function is currently labor intensive and due to limited resources rehabilitation outcomes are not optimal. On the other hand, robot arm technology is rapidly developing, collaborative robots (cobots) can work safely in same space with humans. At HUMEA laboratory KUKA lbr iiwa 14 collaborative robot is mounted on the wall.
Iiwa can be used to develop a range of applications for rehabilitation of upper limb function. The robot arm can perform repetitive tasks independently, thus reducing the need for human work to perform a sufficient amount of rehabilitation exercises.
Main application under development is robot-assisted mirror therapy, which suits for situations were stroke patient’s healthy side is working and affected side would benefit for motion therapy. Motion of healthy side is measured and modelled using wearable IMU sensors and biomechanical modelling software. Trajectory of a selected point of arm is transmitted to robot controller in real time, and tip of robot arm moves so that if affected arm is attached to the tip, motion is mirrored from the healthy side. At current development phase a handlebar is mounted on tip of the robot. Next important step will be development of a splint, interface between the robot tip and human arm.
Other, more simple, concepts developed using the robot include: 1: repeating a subject-specific movement trajectory for the arm (can be utilized is prevention of spasticity). 2. game-like application where patient needs to steer the robot flange to reach target points shown on screen with specified speed.
In addition, HTC Vive virtual reality device can be used to create rehabilitation games and virtual environments where activities of daily living can be trained at the late stage of rehabilitation.
In addition KUKA iiwa is utilized in developing robot-assisted transcranial magnetic stimulation (TMS). Aim is that robot-arm will replace human arm in positioning and holding TMS coil at correct location.
Expertise on stroke rehabilitation is provided by clinical experts from Vetrea Terveys. Collaboration related to robot-assisted TMS is done with professor Petro Julkunen (KUH; UEF). Develepment work has been done in several ERDF-projects funded by Regional Council of Pohjois-Savo. Currently (2020-2021) in DigiCenterNS projects.